Introduction
RoboCup is an international initiative to foster research in the field of robotics and artificial intelligence. It serves as a common testbed for comparing research results in the robotics field. Besides its particularly well-known various robotic soccer leagues, RoboCup also features application-oriented leagues which serve as common testbeds for challenges from real-world environments. The industry-oriented RoboCup Logistics League (RCLL) tackles the problem of production logistics in a smart factory. Groups of three robots have to plan, execute, and optimize the material flow and deliver products according to dynamic orders in a simplified factory. The challenge consists of creating and adjusting a production plan and coordinate the group
Development of the League
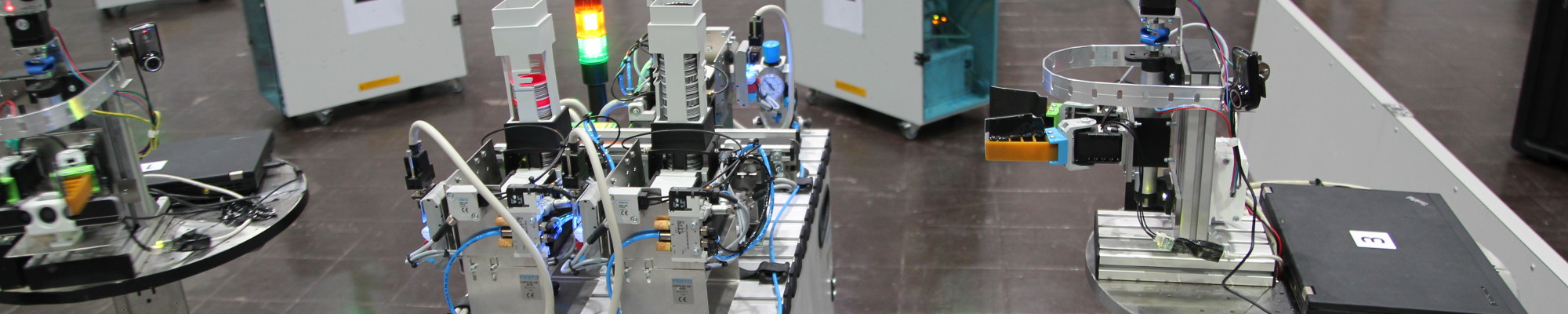
I have been instrumental in advancing the state of the league since 2012 as member of the RoboCup Logistics League Technical Committee and the RoboCup Executive Committee. I have driven major developments, for example devising and developing the referee box, an autonomous agent controlling the overall game and playing field, as a knowledge-based system (paper), which was then also used for the RoboCup@Work competitions and the RoCKIn EU project (industrial sub-challenge). But even more, by bringing ideas for improvements to the league and incrementally raising the difficulty of the league. While the game was played by a single team on a small field until 2013, in 2014 we merged the fields and required that teams implement state-of-the-art self-localization and navigation capabilities in their robots. In 2015, we then introduced the production stations shown on the pictures, making the game easier to understand from the outside, but also increasing the handling challenges for the teams. I have co-organized efforts (paper) for a closer integration of the industrial RoboCup challenges which lead to the foundation of the RoboCup Industrial umbrella league and the RoboCup Industrial cross-over challenge (paper).
The following video gives an overview of RoboCup Industrial. I was
interviewed to explain the RCLL (at about 1:26).
Carologistics RoboCup Team
From 2012 to 2017, I have helped to create and lead the Carologistics RoboCup Team. During this time, I mentored a number of students for their software development, and for their Bachelor’s and Master’s theses, several of which lead to conference publications and book chapters. The team started from scratch in 2012 and we persevered to build a robust and capable system. We went on to win all international RoboCup Logistics League competitions from 2014 to 2017 (RoboCup and German Open). I played key roles in the overall software development, which is based on the Fawkes software framework (RCLL release, paper), writing several journal and conference papers as well as book chapters (including a best technical paper award), and organizing international winter and summer schools and several hackathons.
Playoffs 2014
This was one of the most contested and challenging games in the old
setup that was used until 2014.
Final 2016
A final using the new setup with actual production machines.
Planning and Execution Competition in Simulation
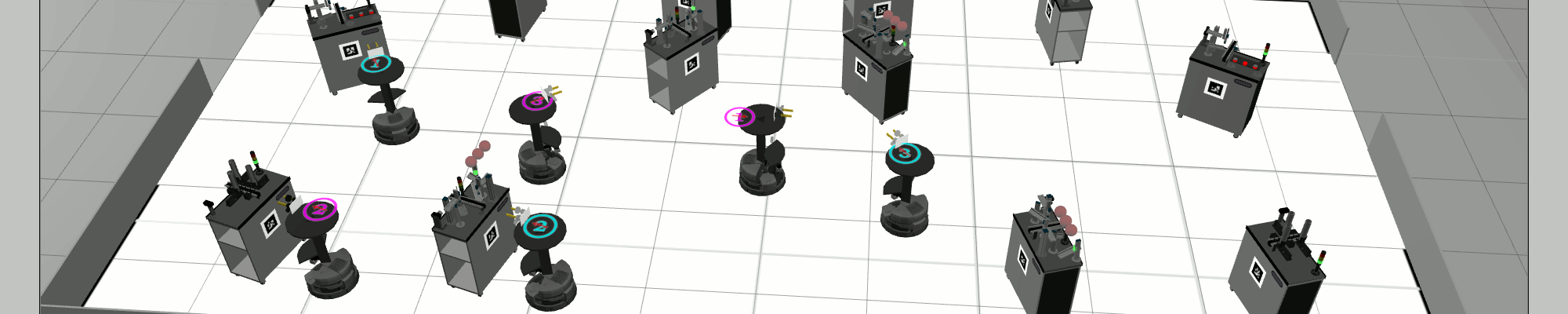
Based on the Carologistics software stack and a Gazebo-based simulation the team has developed, we have partnered with the Model-based Embedded & Robotic Systems Group from MIT and Cognitive Robotics Lab at Technion Israel to run the Planning and Execution Competition for Logistics Robots in Simulation in 2017 and 2018 at the ICAPS conference.
The simulation is run in a cloud-based cluster setup (code) using Kubernetes. Teams produce Docker containers as their artifacts which are then run as part of a fully automated simulation tournament.
In the competitions, our team won in 2018 and was the runner-up in 2017.
Video showing the simulation in action.